Tutorial 6 - Improved Visuals
Overview
This tutorial will cover changing the node icons, changing the background, and changing or hiding links.
Files
Below is the list of files used for this tutorial.
- a mobility script for a node
- /opt/core/share/tutorials/tutorial6/demo.py
- drone icon
- /opt/core/share/tutorials/tutorial6/drone.png
- background image
- /opt/core/share/tutorials/tutorial6/terrain.png
- the scenario after making all changes below
- /opt/core/share/tutorials/tutorial6/completed-scenario.xml
Running this Tutorial
This section will cover running this sample tutorial that develops a scenario file.
- Ensure that /opt/core/etc/core.conf has grpcaddress set to 0.0.0.0
- Make sure the core-daemon is running in a terminal
sudo core-daemon - In another terminal run the GUI
core-gui
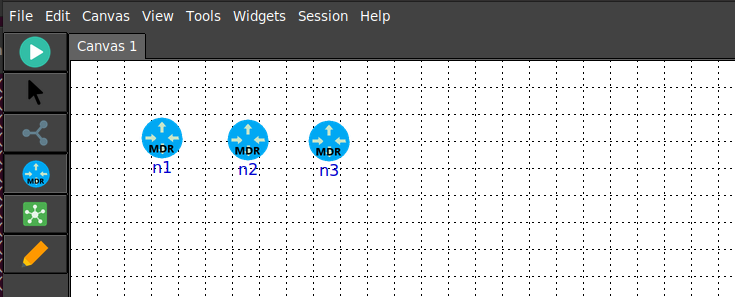
Changing Node Icons
-
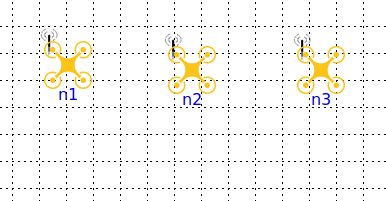
Create three MDR nodes
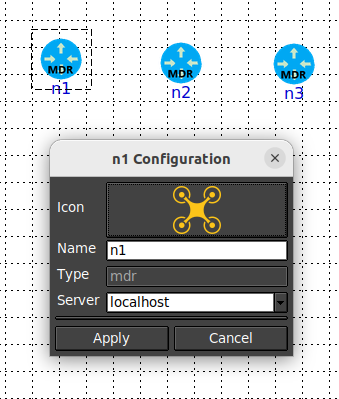
-
Double click on each node for configuration, click the icon and set it to use the drone.png image
-
Use Session -> Options and set Control Network 0 to 172.16.0.0./24
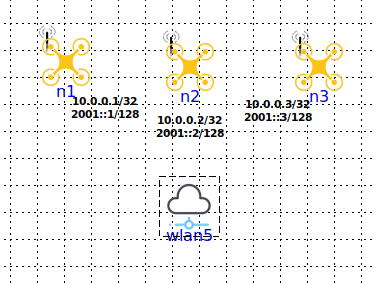
Linking Nodes to WLAN
- Add a WLAN Node
-
Link the three prior MDR nodes to the WLAN node
-
Click play to start the scenario
-
Observe wireless links being created
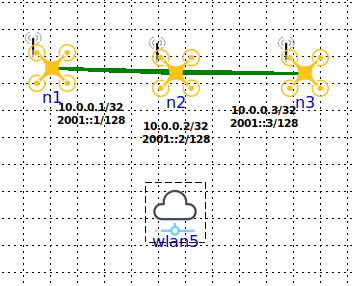
-
Click stop to end the scenario
- Right click the WLAN node and select Edit -> Hide
- Now you can view the nodes in isolation
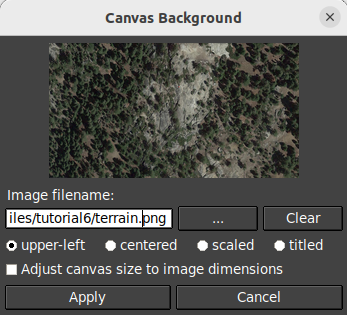
Changing Canvas Background
-
Click Canvas -> Wallpaper to set the background to terrain.png
-
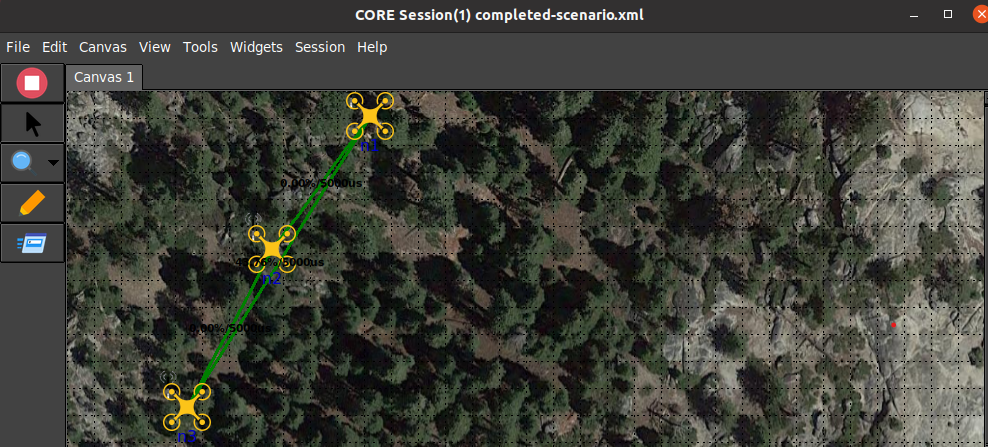
Click play to start the scenario again
- You now have a scenario with drone icons, terrain background, links displayed and hidden WLAN node
Adding Mobility
- Open and play the completed-scenario.xml
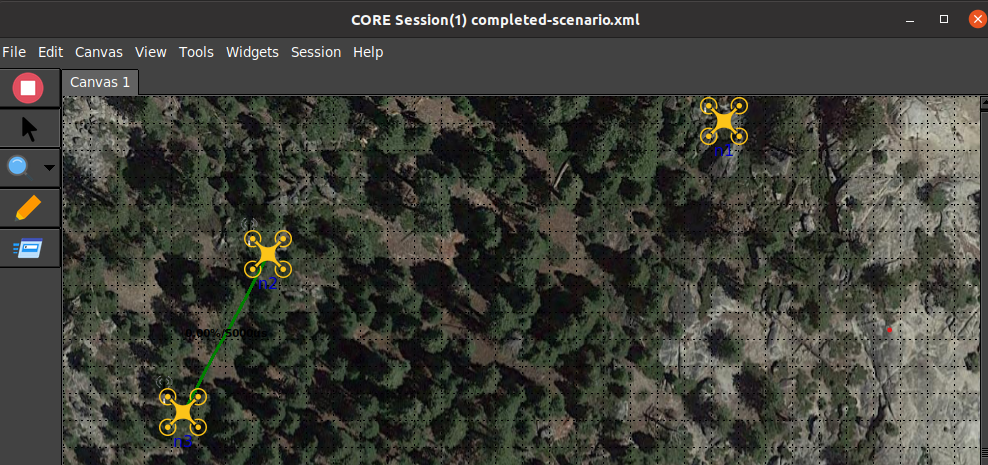
- Double click on n1 and run the demo.py script
# node id is first parameter, second is total nodes /opt/core/venv/bin/python demo.py 1 3 -
Let it run to see the link break as the node 1 drone approches the right side
-
Repeat for other nodes, double click on n2 and n3 and run the demo.py script
# n2 /opt/core/venv/bin/python demo.py 2 3 # n3 /opt/core/venv/bin/python demo.py 3 3 - You can turn off wireless links via View -> Wireless Links
- Observe nodes moving in parallel tracks, when the far right is reached, the node will move down
and then move to the left. When the far left is reached, the drone will move down and then move to the right.
